




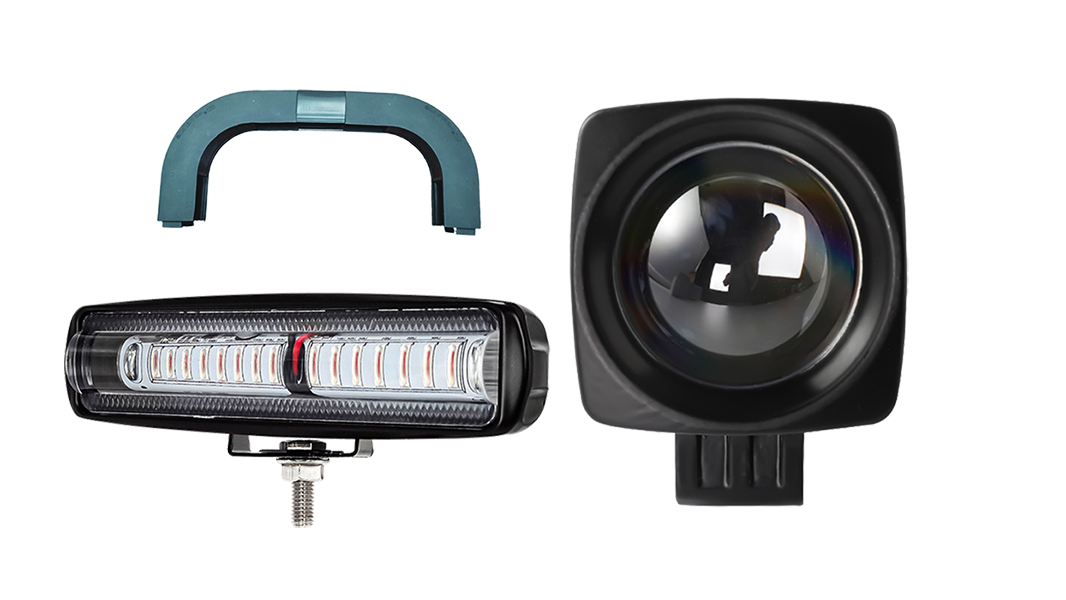


Camera
Object Finder-iTof


Object Finder-iTof
Depth Resolution
RGB Resolution
Output Format
Connectivity
Durability




.png)
| Model | AB-CM-3D-OR-iTof |
| Performance Parameters | |
| Technology | ToF (Time-of-flight) Depth Camera |
| Illumination | 940 nm, 2 x 6 W Optical Power VCSEL |
| Depth Sensor Resolution and Frame rate | 640 x 480 @ 15 fps |
| RGB Sensor Resolution and Frame Rate | 1600x1200 @ 15 fps |
| ToF HDR Mode | Supported with Max. 10 fps |
| Depth Sensor FOV | H - 67° V - 50° |
| RGB Sensor FOV | H - 70° V - 50° |
| Output Formats | 16 bit (Depth) + 8 bit (IR) + JPEG (RGB) |
| Use Range | 0.15 m – 5 m |
| Accuracy | <1% |
| Power Consumption | Average Max. 7 W(Ref) |
| Essential Parameters | |
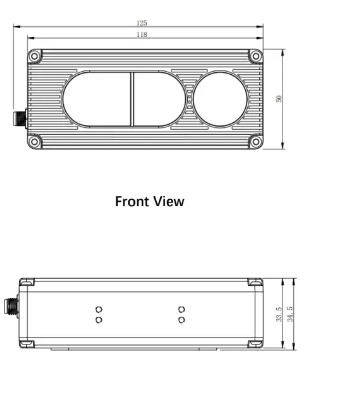
| Dimensions | 125 mm × 50 mm × 34.5 mm |
| Net Weight | 256 g |
| Data Transmission | Gigabit Ethernet |
| Digital I/O(Synchronization) | 1 input, Passive Sync Signal |
| IP Ratings | IP42 |
| Software | C / C++ / Python / C# / ROS / ROS2 |
| Operating System | Windows 7/8/10/11, Linux, Arm Linux |
| Cooling | Passive, no fan |
| Environmental Parameters | |
| Power Supply | DC power |
| Working Temperature | - 20° – 50°C |
| Storage Temperature | - 30°C – 70°C |

Discover the future of AGV technology with ATOMBOTIX




.webp)








